Attaching Bodies using Joints
Joints
In most situations, you won’t have just solid box-shaped or cylinder-shaped models, but for example a human character has multiple body parts which can all move in a different way. If you would make the entire character one solid body, you wouldn’t be able to move them independently of each other, and if you made every body part a separate solid body, all the body parts would fall off since they are not attached to each other. This is where Joints come in.
Joints are basically used to attach bodies to each other, or to attach a body to
the environment. There are several different kinds of joints: OdeHingeJoint,
OdeBallJoint, OdeSliderJoint, just to name a few. (Check the panda3d.ode
page in the API Reference for a more complete list.)
OdeBallJoint example
To explain how joints work, look at the following example:
from direct.directbase import DirectStart
from direct.directtools.DirectGeometry import LineNodePath
from panda3d.core import *
from panda3d.ode import *
# Load the smiley and frowney models
smiley = loader.loadModel("smiley.egg")
smiley.reparentTo(render)
smiley.setPos(-5, 0, -5)
frowney = loader.loadModel("frowney.egg")
frowney.reparentTo(render)
frowney.setPos(-12.5, 0, -7.5)
# Setup our physics world
world = OdeWorld()
world.setGravity(0, 0, -9.81)
# Setup the body for the smiley
smileyBody = OdeBody(world)
M = OdeMass()
M.setSphere(5000, 1.0)
smileyBody.setMass(M)
smileyBody.setPosition(smiley.getPos(render))
smileyBody.setQuaternion(smiley.getQuat(render))
# Now, the body for the frowney
frowneyBody = OdeBody(world)
M = OdeMass()
M.setSphere(5000, 1.0)
frowneyBody.setMass(M)
frowneyBody.setPosition(frowney.getPos(render))
frowneyBody.setQuaternion(frowney.getQuat(render))
# Create the joints
smileyJoint = OdeBallJoint(world)
smileyJoint.attach(smileyBody, None) # Attach it to the environment
smileyJoint.setAnchor(0, 0, 0)
frowneyJoint = OdeBallJoint(world)
frowneyJoint.attach(smileyBody, frowneyBody)
frowneyJoint.setAnchor(-5, 0, -5)
# Set the camera position
base.disableMouse()
base.camera.setPos(0, 50, -7.5)
base.camera.lookAt(0, 0, -7.5)
# We are going to be drawing some lines between the anchor points and the joints
lines = LineNodePath(parent=render, thickness=3.0, colorVec=(1, 0, 0, 1))
def drawLines():
# Draws lines between the smiley and frowney.
lines.reset()
lines.drawLines([((frowney.getX(), frowney.getY(), frowney.getZ()),
(smiley.getX(), smiley.getY(), smiley.getZ())),
((smiley.getX(), smiley.getY(), smiley.getZ()),
(0, 0, 0))])
lines.create()
# The task for our simulation
def simulationTask(task):
# Step the simulation and set the new positions
world.quickStep(globalClock.getDt())
frowney.setPosQuat(render, frowneyBody.getPosition(), frowneyBody.getQuaternion())
smiley.setPosQuat(render, smileyBody.getPosition(), smileyBody.getQuaternion())
drawLines()
return task.cont
drawLines()
taskMgr.doMethodLater(0.5, simulationTask, "Physics Simulation")
base.run()
The part of the code that does the magic is this:
# Create the joints
smileyJoint = OdeBallJoint(world)
smileyJoint.attach(smileyBody, None) # Attach it to the environment
smileyJoint.setAnchor(0, 0, 0)
frowneyJoint = OdeBallJoint(world)
frowneyJoint.attach(smileyBody, frowneyBody)
frowneyJoint.setAnchor(-5, 0, -5)
This creates two joints, the first to attach the smiley to the environment, and
the second to attach the frowney to the smiley. The attach() method on the
joint is used to set the two bodies that are attached; you can replace either
argument with None to attach them to the environment. The setAnchor method
is used to set the anchor point for the joints.
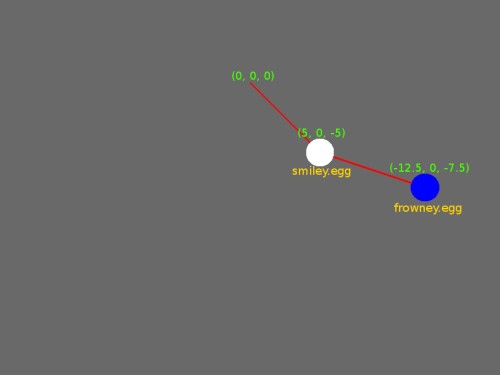
In this image you can see how the joints are set up: