Cube Maps
There is one more special kind of texture map: the cube map. A cube map is similar to a 3-D texture, in that it requires 3-D texture coordinates (u, v, w); also, a cube map is stored on disk as a sequence of ordinary 2-D images.
But unlike a 3-D texture, which is defined by stacking up an arbitrary number of 2-D images like pancakes to fill up a volume, a cube map is always defined with exactly six 2-D images, which are folded together to make a cube.
The six images of a cube map are numbered from 0 to 5, and each image corresponds to one particular face of the cube:
image 0 |
The +u (or +x) face (right) |
image 1 |
The -u (or -x) face (left) |
image 2 |
The +v (or +y) face (forward) |
image 3 |
The -v (or -y) face (back) |
image 4 |
The +w (or +z) face (up) |
image 5 |
The -w (or -z) face (down) |
By +x face, we mean the face of the cube farthest along the positive X axis. In Panda3D’s default Z-up coordinate system, this is the right face. Similarly, the -x face is the face farthest along the negative X axis, or the left face, and so on for the Y and Z faces. Since the coordinates of a texture map are called (u, v, w) instead of (x, y, z), it is technically more correct to call these the +u and -u faces, though it is often easier to think of them as +x and -x.
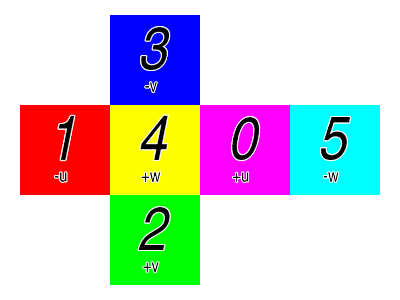
The faces are laid out according to the following diagram:
Imagine that you cut out the above diagram and folded it into a cube. You’d end up with something like this:
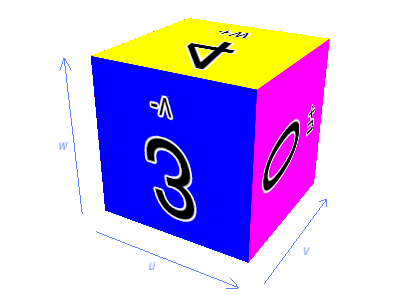
Note that, when you hold the cube so that the axis indications for each face are in the appropriate direction (as in the picture above), several of the faces are upside-down or sideways. That’s because of the way the graphics card manufacturers decided to lay out the cube map faces (and also because of Panda3D’s default coordinate system). But in fact, it doesn’t matter which way the faces are oriented, as long as you always generate your cube map images the same way.
In some sense, a cube map is a kind of surface texture, like an ordinary 2-D texture. But in another sense, it is also volumetric like a 3-D texture: every point within the 3-D texture coordinate space is colored according to the face of the cube it comes closest to. A sphere model with the cube map applied to it would pick up the same six faces:
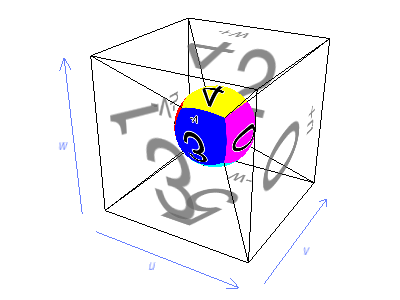
Note that, while a 3-D texture assigns a different pixel in the texture to every point within a volume, a cube map assigns a different pixel in the texture to every direction from the center.
You can load a cube map from a series of six image files, very similar to the way you load a 3-D texture:
tex = loader.loadCubeMap('cubemap_#.png')
As with a 3-D texture, the hash mark (“#”) in the filename will be filled in with the image sequence number, which in the case of a cube map will be a digit from 0 to 5. The above example, then, will load the six images “cubemap_0.png”, “cubemap_1.png”, “cubemap_2.png”, “cubemap_3.png”, “cubemap_4.png”, and “cubemap_5.png”, and assemble them into one cube map.